多线程模式
· 阅读需 9 分钟

前面了解的都是多任务管理,但现代操作系统都以线程为基本执行单位,所以本篇学习如何在多处理器系统下进行多线程管理。
线程带来的结构改变
任务链
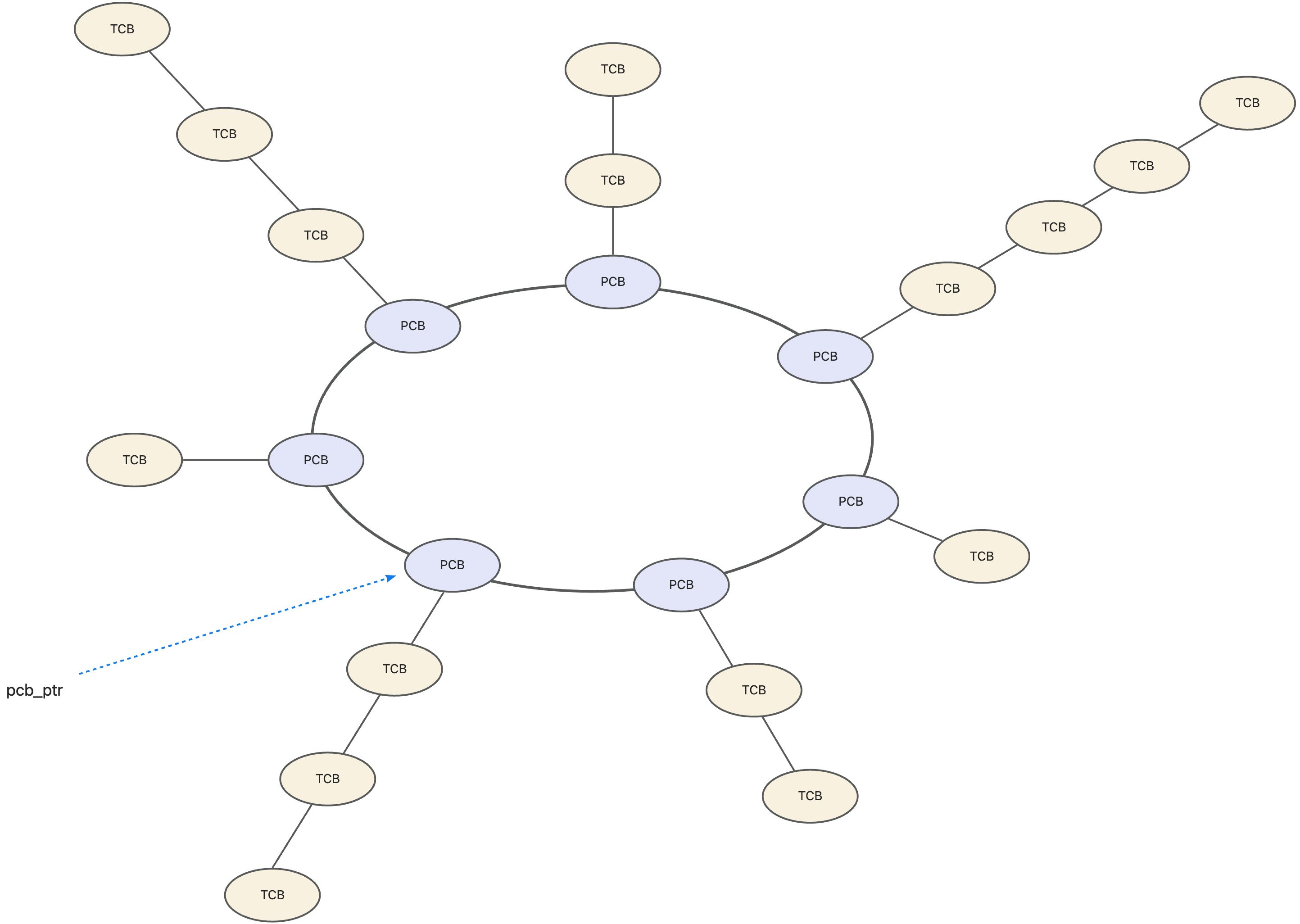
再多线程模型中,任务只是一个容器,线程是一定属于某一任务的。执行时,实际执行的是线程。而进程作为容器则只提供公共的地址空间。所有线程共享进程的资源。
进程控制块 PCB
PCB 的结构需要调整,原本我们在 PCB 中存储各个寄存器的内容。由于现在处理器在做任务切换时,实际切换的是线程,所以这些内容要挪到 TCB 中,而 PCB 得到大幅简化。

- 任务状态:现在任务状态可以简化成两种,运行态和终止态。
- CR3:之所以保留 CR3,是因为 CR3 用于分页,而所有线程是共享进程地址空间的。
- 线程链表首节点的线性地址:它指向任务的第一个 TCB。
线程控制块 TCB

任务创建和调度流程

由于执行代码的基本单位从进程变成了线程,所以进程变成了容器。
- 任务(PCB)管理地址空间、资源等环境;线程(TCB)管理执行流、寄存器、栈、状态和时间片。
- 主线程的创建:在创建任务(create_process)时,必须同步创建其第一个线程——主线程。主线程的入口点就是任务的入口点。
- 执行上下文的转移:关键的执行信息(如入口地址、栈、状态、时间片)从 PCB 转移到了 TCB 中。
- 双重记录:处理器的专属存储区需要同时记录当前任务(PCB)和当前线程(TCB),因为线程在执行时离不开其所属任务的环境。

- 调度单位的改变:调度器(search_for_a_ready_thread)寻找的不再是就绪的“任务”,而是就绪的“线程”。
- 中断处理:新线程认领中断和时间片到期中断的处理逻辑,其操作对象都由任务变为了线程。
新建线程
假设当前线程工作在用户态,想要新建线程,需要进行系统调用。线程创建后,系统即将其交给调度器调度。所以什么时间执行新创建的线程在用户程序层面是不可控的。

ret 指令的双重语义:
- 被 call 调用时:栈中有真实的返回地址,ret 正常返回调用者
- 作为线程执行时:栈中植入的是线程结束代码地址,ret 会跳转到终止流程
兼容性目标:同一个函数既可以作为传统子程序被调用,也可以作为现代线程并发执行,为系统从单线程向多线程平滑过渡提供了技术基础。
线程结束和任务终止

线程休眠
线�程休眠后,线程进入阻塞状态,处于阻塞状态的线程不会被 CPU 调度。
我们可以通过设置外部定时器中断,中断发生时处理器检查线程的休眠时间是否到期。
用户程序想要实现线程休眠需要执行系统调用。
系统调用的流程如下:

系统管理中断处理流程:

再来看看休眠唤醒的handle_waiting_sleep过程:

线程等待
我们所说的线程等待,是指线程 A 需要等待线程 B 执行完才能继续执行的这种情况。

多线程竞争互斥锁
其实互斥锁的本质就是一块共享内存空间,通过原子操作尝试去改变该共享空间的值,只有交换回 0 值(即锁未被占用)的线程才能成功获得锁,而其他线程需要陷入休眠,等待下一次系统管理中断时重新尝试竞争锁。
下面是一个多线程竞争互斥锁的示例流程。